
Project TERN
The TERN Project

TERN: Three-dimensional force and temperature sensing skins. Funded by ARIA.
Today’s robots often struggle with delicate tasks due to limited tactile feedback. We are developing next-generation electronic skin (e-skin) to equip robots with human-like touch perception. Our multiscale structured design enables real-time, high-resolution 3D sensing of force magnitude and direction, temperature, texture, sliding, and surface stiffness with unprecedented dexterity and precision. By introducing this advanced level of tactile sensing, our e-skin addresses a fundamental gap in current robotic capabilities. It enhances robotic perception and human-robot collaboration, unlocking new applications in surgical robotics, agriculture, precision manufacturing, and AI-driven automation. Supported by ARIA’s Robot Dexterity programme, the project advances both foundational research and early translational development, aiming to elevate the technology from TRL 3 to TRL 6 through performance optimisation, system integration, and industrial validation.
Investigator

Prof Tawfique Hasan
- Role: Project management
- Prof Hasan's Cambridge Engineering Profile Page
Postdoctoral Research Associates

Prof Guolin Yun
- Role: SRA, material composition and sensor array
- Cambridge NanoEngineering Group People Page

Dr Zhuo Chen
- Role: Composite formulation and structural design
- Cambridge NanoEngineering Group People Page
- Churchill College Fellow Page

Dr Doğa Doğanay
- Role: Electrical readout and electronics integration
- Cambridge NanoEngineering Group People Page
Technician

Mr Amir Nateghi
- Role: Sensor fabrication and batch tests
- Cambridge NanoEngineering Group People Page
MPhil Students
Mr Madhurjot Sohi
- Role: Robotic Hands and Sensor Integration
- Cambridge NanoEngineering Group People Page
News

Giving Robots an Ultra-Sensitive Sense of Touch
8 June 2026
Our work, recently highlighted by Cambridge Enterprise, marks a major milestone in robotics by solving one of the industry's longest-standing hardware bottlenecks: the sense of touch. While modern robots excel at visual perception, they heavily lack tactile intelligence. This means robotic grippers often struggle to handle delicate or irregularly shaped objects safely, frequently applying too much force or letting items slip. To bridge this critical gap, our group, the TERN team at the Cambridge Graphene Centre, have engineered a microscopic, high-precision tactile sensor that gives robotic hands unprecedented dexterity.
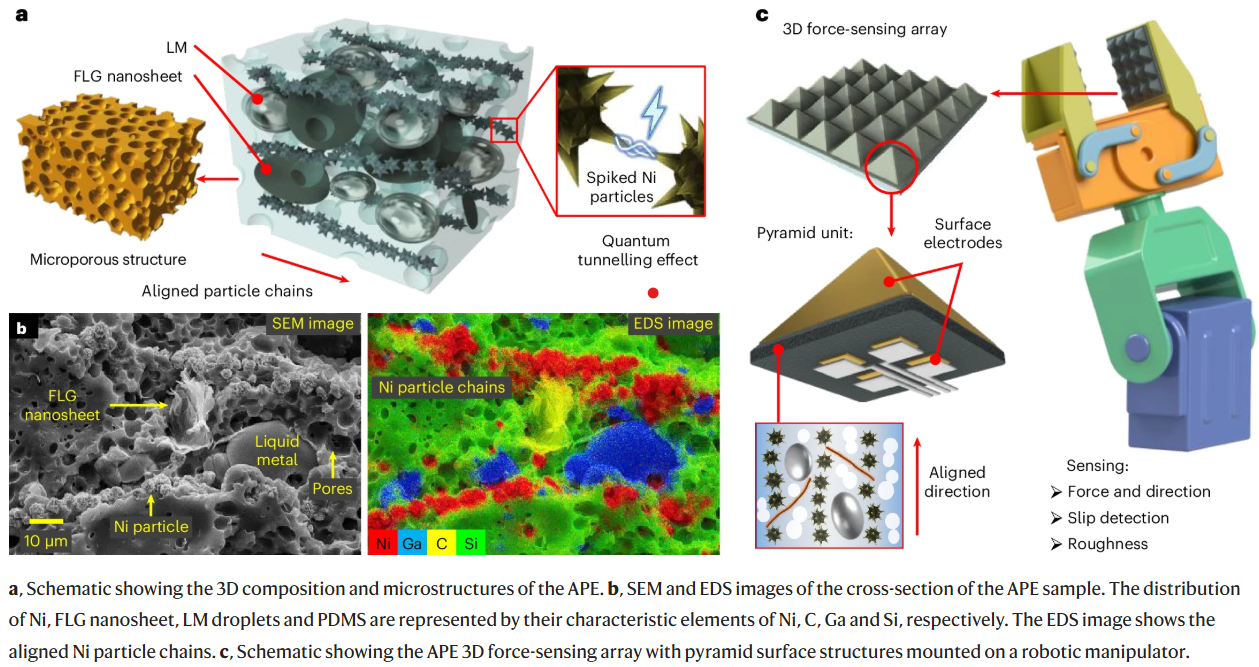
The breakthrough, which was recently published in Nature Materials, utilizes a sponge-like composite of graphene, liquid metal and aligned nickel particles molded into tiny pyramids. This architecture replicates the natural structure of human skin but with a massive performance upgrade. The sensor features a spatial resolution of 0.2 millimeters, ten times sharper than a human fingertip, giving it the sensitivity to detect something as small as a single grain of sand. Crucially, it can instantly differentiate between regular gripping force and the subtle friction of an object beginning to slide.
Now patented through Cambridge Enterprise ahead of a commercial university spinout, the team aims to deploy these sensors as a seamless, plug-and-play upgrade for existing robotic fingers. Because the technology is compact and highly scalable, it holds massive potential for fields where delicate handling is a necessity. Immediate applications include advanced prosthetics, minimally invasive surgical tools, safe human-robot interactions in eldercare and automated agricultural systems that can harvest fragile crops without causing damage.
You can read the full interview and view lab details on the Cambridge Enterprise website.

Smarter Robot Bodies Workshop – Advancing 3D Force Sensing
17 April 2026
We recently participated in the Smarter Robot Bodies, All Creator Workshop, a three-day programme led by the Advanced Research and Invention Agency (ARIA), focused on advancing science, engineering and the translation of research into real-world impact. Now over a year into the initiative, the workshop brought together funded teams, partners and experts to share progress, showcase demonstrations and explore the future of robotics. The programme combined technical deep dives with discussions on robot dexterity, product–market fit and commercialisation, alongside insights from industry, investors and policymakers. Collaborative sessions and creator clinics further supported the transition from research to application. As part of this initiative, our goal is to take our three-dimensional force sensor to the next stage of development. We are actively advancing this work with a dedicated, interdisciplinary team, driving progress from concept towards real-world deployment.

Our Research Featured: Graphene-Based Artificial Skin Advancing Robotic Touch
30 March 2026
We’re pleased to share that our latest work at the University of Cambridge has been featured on the University’s research news platform. The article highlights our development of a graphene-based artificial skin designed to bring human-like touch capabilities closer to robotic systems. By using graphene’s unique electrical and mechanical properties, the team has created a flexible, sensitive material capable of detecting pressure and interaction with a high level of precision. This research represents an important step forward in enabling robots to interact more safely and effectively with their surroundings. It also opens up exciting possibilities for applications in prosthetics, healthcare technologies, and advanced manufacturing. We encourage you to have a look at the full feature to learn more about the project and its potential impact:
👉 https://www.cam.ac.uk/research/news/graphene-based-artificial-skin-brings-human-like-touch-closer-to-robots
You can also watch a short video showcasing the technology and its applications here:
👉We're teaching robots to feel: New 3D force sensor
Multiscale-structured miniaturized 3D force sensors, published in Nature Materials
9 March 2026
At Cambridge, our team has developed a new miniaturised fingertip sensor that allows robots to detect subtle forces and recognise when an object starts to slip. The sensor can measure the full 3D force on the fingertip, helping robots distinguish between pressure and sideways forces. Big congrats to Guolin Yun and the team at University of Cambridge. The work now feeds directly into our Advanced Research + Invention Agency (ARIA) robotic dexterity programme, where we are raising the TRL level to make a difference to future dexterous robots with Zhuo Chen, Doğa Doğanay, Madhurjot Sohi and Amir Nateghi (more).

Dr Doğa joined the project team
13 October 2025
We are delighted to announce that Dr Doğa has joined the project team as PDRA as of today. He will be supporting our work on Electrical readout and electronics integration. Warmest welcome!
Madhurjot joined the project team
03 October 2025
We are delighted to announce that Madhurjot has joined the project team as a MPhil as of today. He will be supporting our work on Robotic Hands and Sensor Integration. Warmest welcome!
Amir joined the project team
14 July 2025
We are delighted to announce that Amir has joined the project team as a Process Technician as of today. He will be supporting our work on composite-material formulations and sensor development. Warmest welcome!

Zhuo completed the Impulse Programme
11 July 2025
Zhuo has successfully completed the renowned entrepreneurial training Impulse Programme at the Maxwell Centre. Through its action‑learning format, he crafted an investment pitch that earned overwhelmingly positive feedback. His work has since been featured in Business Weekly, Cambridge Independent and The Engineer UK.

ARIA Robotics Creator Workshop
13 March 2025
We attended the 3-day ARIA Robotics Creator Workshop at the Manufacturing Technology Centre (MTC), where we had the opportunity to showcase our technology, connect with fellow creators, and engage with programme and activation partners. The event provided valuable insights into the broader ecosystem of robot dexterity and helped us identify potential collaborators for downstream integration and testing.
![]()
Project kick-off
1 March 2025
The TERN project officially kicks off today!!
Printer testing at Surrey University
11 December 2024
Guolin and Zhuo visited the Advanced Technology Institute (ATI) at the University of Surrey to explore printing of micrometre-resolution electrical connections on soft substrates using the XTPL Delta tool. Many thanks to Prof. Radu Sporea, Spencer Skinner, and Dr. Dimitar Kutsarov for their warm hospitality and support during the visit.